

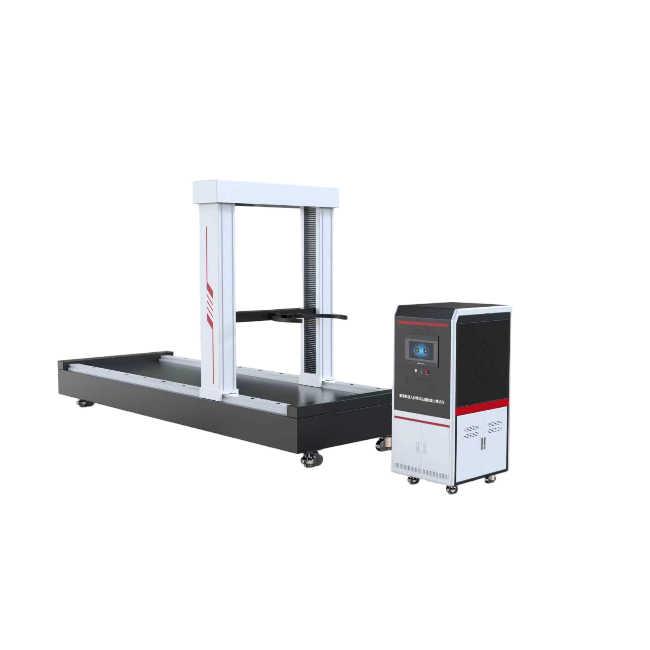
腿型机器人持续冲击抵抗能力测试仪
一、设备介绍
用于测试特定种类腿式机器人在被施加持续性外力时保证平衡的能力。
二、参照标准
GB/T 44251-2024
三、试验条件:
1、试验环境 环境温度:-20℃~40℃;相对湿度:0%~80%
2、行进面要求 行进面应水平且坚硬平整,摩擦系数介于0.75~1.0之间
3、电源要求 220V 50HZ
四、主要性能
1、操作方式 全触控操作,可设置、调用、修改测试程序
2、控制面板 12寸工控一体机
3、操作系统 Wiondows+PLC
4、测力范围 0-400N
5、测力精度 ±0.05%FS
6、接触点高度 0.1-1.2米 可调
7、测试速度 0-1000mm/min 可调(可更换其他速度)
8、测试行程 0.5-1.5米 可调 (可更换其他行程)
9、行走面长度 2米 (可更换其他长度)
10、行走面宽度 1米 (可更换其他宽度)
11、专业测试软件 实时采集绘制测试曲线,我司自制
12.超声波测距仪 1米/2米
13.位移测试量程 0.7-1米 精度:0.01米
14.外形尺寸 主体长2200mm,宽1300mm,高2000mm
电控箱长400mm,宽500mm,高1000mm
五、结构特点
1、主机材料 采用氧化处理,防静电漆面
2、控制系统 嵌入式工控机,自制控制软件,操作简便,各项参数功能实时监控,保证设备运行的流畅以及对应的参数的实现。
3、施力装置 保证施力平稳、力值精准可控,避免瞬间爆发力干扰测试结果
4、行走面 为水平平整的测试地面,地面摩擦系数需符合标准要求并保持稳定,避免因地面打滑等额外因素影响测试准确性,确保试验环境的一致性
5、数据采集模块 配备力传感器实时采集施力装置的输出力值,同时搭配机器人自身的惯性测量单元等设备,同步记录机器人的行进速度,为后续计算冲击抵抗能力参数提供依据
六、数据显示
实时显示当前力值、测试时间、位移距离、力值-时间曲线
可导出数据,WIF连接上传数据,远程提取数据,可连接打印机打印数据
七、功能介绍
1、测试模式:腿式机器人沿测试面行走,保证匀速之后接触施力物,机器人持续向前,直到无法继续位移,记录传感器力值
2、保护功能:开断电保护、力值超限保护、系统过载保护、漏电保护
3、定距离模式 持续位移,到达指定位置后停止,并记录
4、定位移模式 监测被测试机器人的位移,停止移动后记录力值
5、测试模式 一键启动自动测试
6、保护功能 开断电保护、力值超限保护、系统过载保护、漏电保护
 客服1
客服1